
Alan Liang
I am a 4th-year PhD student in Shenyang Institute of Automation , Chinese Academy of Sciences advised by Prof. Huaici Zhao. Now, I am a visiting student at NUS advised by Prof. Wei Tsang Ooi.
✉️ liangao@sia.cn | a_liang@u.nus.edu
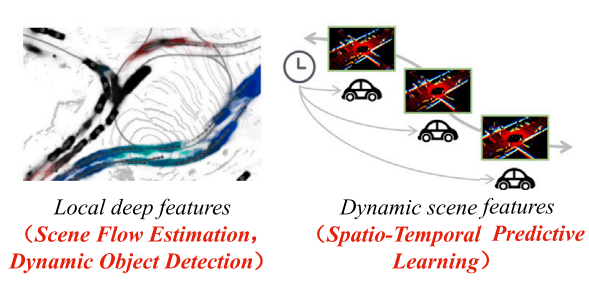
Research Interest: I focus on 3D/4D perception for autonomous driving and robotics. I develop robust yet lightweight models to meet unmanned systems’ strict safety and real-time requirements. Lately, I’m hooked on 3D/4D generation—using synthetic data to replace tedious collection and annotation. My goal: Generate data more realistic than reality itself and free researchers from grunt work.
 ), Dongyue Lu ("Pineapple Scholar"
), Dongyue Lu ("Pineapple Scholar" ), and Yu Yang ("Potato Scholar"
), and Yu Yang ("Potato Scholar" ).
).News
Publications

[0] See4D: Pose-Free 4D Generation via Auto-Regressive Video Inpainting
Dongyue Lu*, Alan Liang*, Tianxin Huang, Xiao Fu, Yuyang Zhao, Baorui Ma, Lingdong Kong‡, Ziwei Liu
Arxiv 2025
[1] 𝒳-Scene: Large-Scale Driving Scene Generation with High Fidelity and Flexible Controllability
Yu Yang, Alan Liang, Jianbiao Mei, Yukai Ma, Yong Liu, Gim Hee Lee
Arxiv 2025
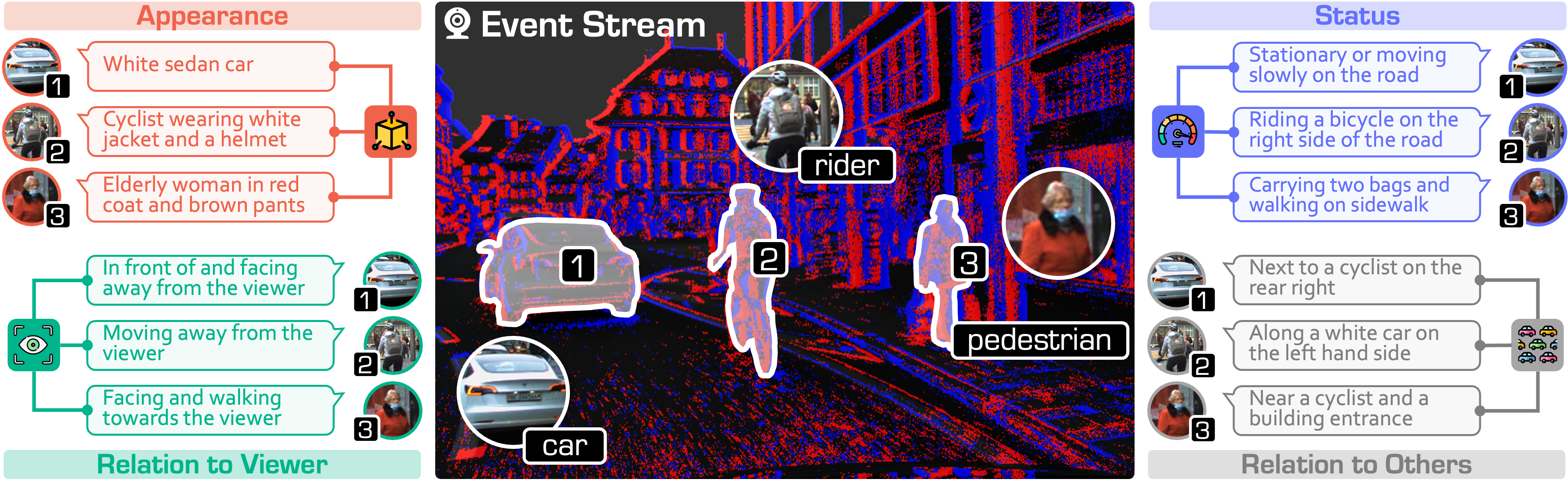
[2] Talk2Event: Grounded Understanding of Dynamic Scenes from Event Cameras
Lingdong Kong*, Dongyue Lu*, Alan Liang*, Rong Li, Yuhao Dong, Tianshuai Hu, Lai Xing Ng, Wei Tsang Ooi, Benoit R. Cottereau
Arxiv 2025

[3] 3EED: Ground Everything Everywhere in 3D
Rong Li*, Yuhao Dong*, Tianshuai Hu*, Alan Liang*, Youquan Liu*, Dongyue Lu*, Liang Pan, Lingdong Kong‡, Junwei Liang, Ziwei Liu
Arxiv 2025
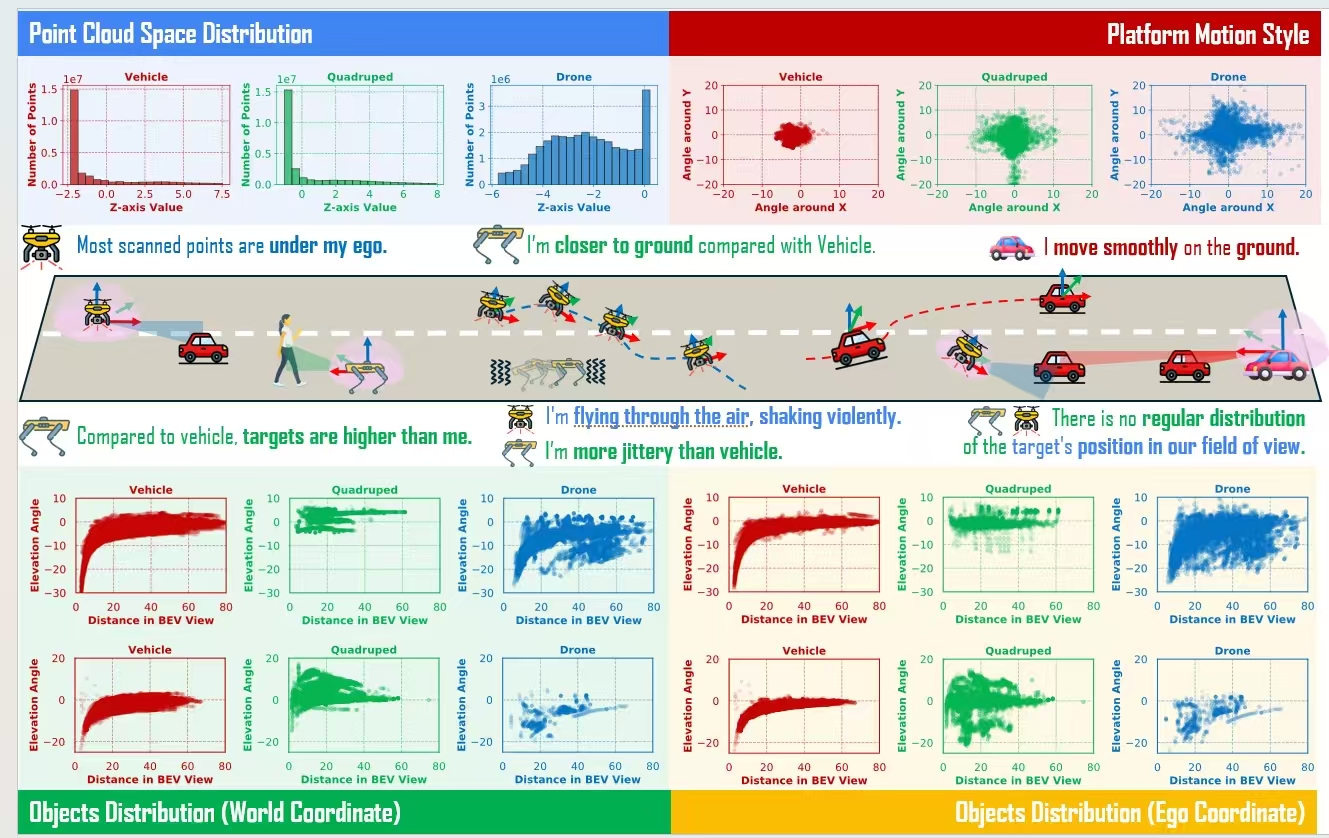
[4] Perspective-Invariant 3D Object Detection
Alan Liang*, Lingdong Kong*, Dongyue Lu*, Youquan Liu, Jian Fang, Huaici Zhao, Wei Tsang Ooi
International Conference on Computer Vision (ICCV 2025)
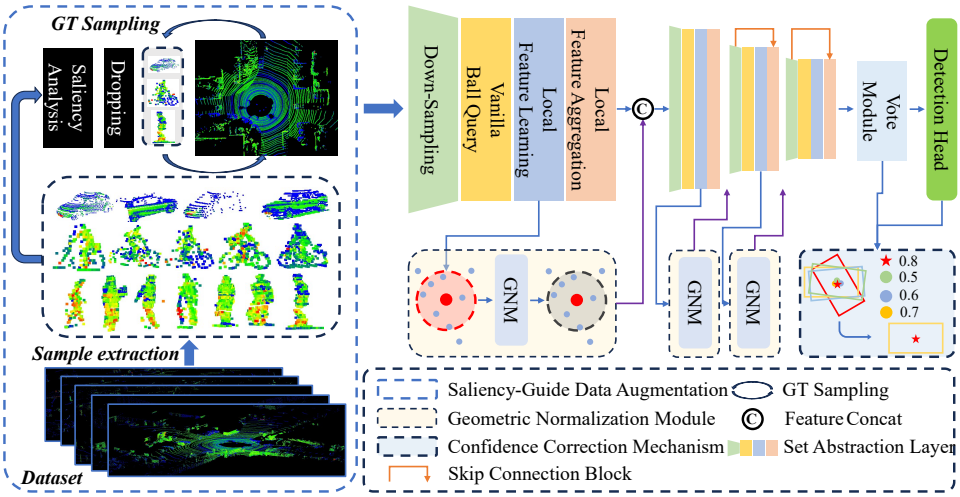
[5] SGCCNet: Single-Stage 3D Object Detector With Saliency-Guided Data Augmentation and Confidence Correction Mechanism
Alan Liang, Wenyu Chen, Jian Fang, Huaici Zhao
Arxiv 2024
[6] PDM-SSD: Single-Stage Three-Dimensional Object Detector With Point Dilation
Alan Liang, Haiyang Hua, Jian Fang, Wenyu Chen, Huaici Zhao
Arxiv 2024
[7] SuPrNet: Super Proxy for 4D occupancy forecasting
Alan Liang, Wenyu Chen, Jian Fang, Huaici Zhao
Knowledge-Based Systems (CAS 1st TOP Quartile, IF: 7.2)
[8] SPSNet: Boosting 3D point-based object detectors with stable point sampling
Alan Liang, Hao Zhang, Haiyang Hua, Wenyu Chen, Huaici Zhao
Engineering Applications of Artificial Intelligence (CAS 1st TOP Quartile, IF: 7.5)
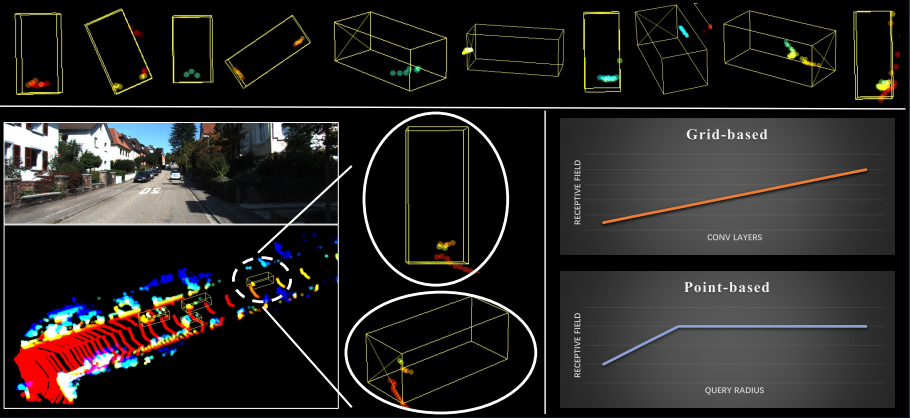
[9] Boosting 3D point-based object detection by reducing information loss caused by discontinuous receptive fields
Alan Liang, Haiyang Hua, Jian Fang, Huaici Zhao, Tianci Liu
International Journal of Applied Earth Observation and Geoinformation (CAS 1st TOP Quartile, IF: 7.6)